Container Project
The purpose of this project was to create a robot that could go down the hall, play music, make a right hand turn, go down the next hall, then make the trip back. This was to be accomplished using an angle sensor and containers. Containers can be used to store values such as the amount of rotations the wheels made so that the information can be used after to make the robot return to it's original position.
Container Robot

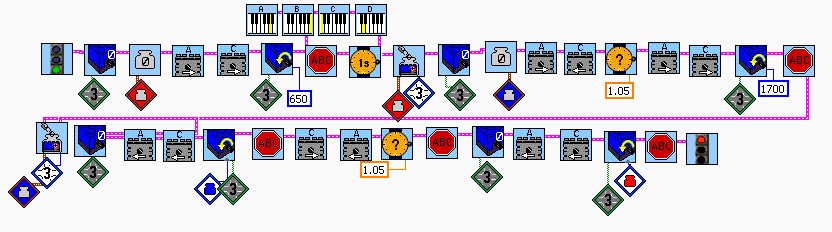
We created a basic robot with an angle sensor. We used large wheels that each had it's own axle to make the robot be able to turn easily. The large wheels made the robot have enough speed to complete the task quickly. Our program started by setting the angle sensor and red container to 0. The robot then went forward with both motors for 650 counts on the angle sensor, it then stopped and played music. It then stored the angle sensor value to the red container. Then it set the angle sensor and blue container to 0. It made a turn for 1.05 seconds and continued forward and stored the value it went forward to the blue container. It then used the blue contaienr value to go backwards the same amount. It made the turn backwards and used the red container value to return to it's starting point.