Table Bot Challenge
This challenge consisted of using programming and a touch sensor to keep a robot from falling off a table for a given amount of time. This was a fairly easy challenge with the purpose being an introduction to the new level of programming we will be using for the next few challenges. The program we needed for this task was provided along with a successful robot design.
Table Bot
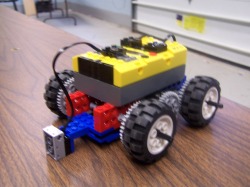
After recreating the program given we examined the robot design given. We made our own modified version of this robot. The touch sensor was placed in front of the robot touching the table, when the touch sensor moved off of the table the robot began to back up and turn to a different direction. This was acheived by using a timer fork, this fork set two different commands depending on whether the touch sensor was pressed in or not. After the timer fork command was a jump pad, a landing pad was placed at the beginning so after the command was done for either moving forward or backing up the program would restart. This challenged did not present any unexpected complications and became successful fairly quickly.
| 100_1818.mov | |
| File Size: | 4522 kb |
| File Type: | mov |
Bug Bot Challenge
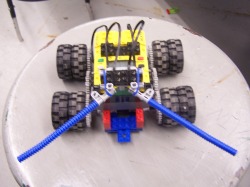
Bug Bot was similiar to Table Bot with the major difference being the replacement of the touch sensor that was pressed in by the table with two objects coming off the front, each resembling an antenna, which activated the touch sensor when an antenna hit an object such as a wall. This would cause the robot to back up each time it hit an object. The design and program were both provided for us.
Bug Bot
| 100_1919.mov | |
| File Size: | 4040 kb |
| File Type: | mov |
