Light Sensor Activities
For this set of activities our task was to use a light sensor to control when certain motors turned on or off in order to make a robot complete a series of tasks including: Moving to a black line before stopping and turning on a light, follow a straight black line and stop at the end, follow a curved black line, and race on a black oval race track. We were given the robot's design for activities A, B, and C. We were then allowed to build our own robot to compete in the Robo-NASCAR challenge. These tasks were designated to provide my partner and me with knowledge of this new tool.
Questions and Answers
1. How do you calculate a threshold value?
Put the light sensor over light and dark surfaces, add the two readings you get from the View Screen, and calculate the average.
2.Why won't this program work with this robot?
The Light Sensor Fork Icon needs a modifier to designate it as port 2.
3.What is a light sensor threshold value?
A value that your robot uses to classify sensor readings as either light or dark.
Robo-NASCAR
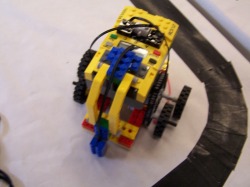
Our design used a chain connecting a large gear to two medium gears to power the wheels. By keeping the medium gears as close to the large gear as possible this gave our robot it's greatest possible speed and maneuverability. The light sensor would turn motor A off and motor C on when it saw the inner white part of the track which would send it back to the left onto the black track. The lgiht sensor would then see the black track and turn off motor C and turn on motor A to send the robot back to the right and onto the white inner part of the track. Our robot completed two laps in 16.73 seconds.
| 100_2293.mov | |
| File Size: | 2326 kb |
| File Type: | mov |
Reflection
This NASCAR competition put problem solving skills to the test. How can we make a light weight, speedy vehicle without compromising it's ability to make sharp turns without crossing to far over the light or dark and ruining the robot's path? We began by researching the functions of the light sensor. After discovering what the light sensor could do, our innovation lead us to attempt to use a angle sensor along with the lgiht sensor to complete the track. After troubleshooting we realized that the introduction of the angle sensor lead to mroe problems than it solved. After experiementing with the relationship between the cars speed and distance between the axels we deducted that moving the wheels as close together as possible. Our invention had the wheels connected to the motor by chain link and the wheels were as close together as they could be without touching each other.
Activity 1
| 100_2188.mov | |
| File Size: | 723 kb |
| File Type: | mov |
Activity 2
| 100_2185.mov | |
| File Size: | 694 kb |
| File Type: | mov |
Activity 3
| 100_2186.mov | |
| File Size: | 1573 kb |
| File Type: | mov |
